Group project with Jacob Bowles, Jack Currie, Oscar Reed, Anqi Chen.
Group project with Jacob Bowles, Jack Currie, Oscar Reed, Anqi Chen.
Group project with Jacob Bowles, Jack Currie, Oscar Reed, Anqi Chen.
PATRICK COULSON DESIGN
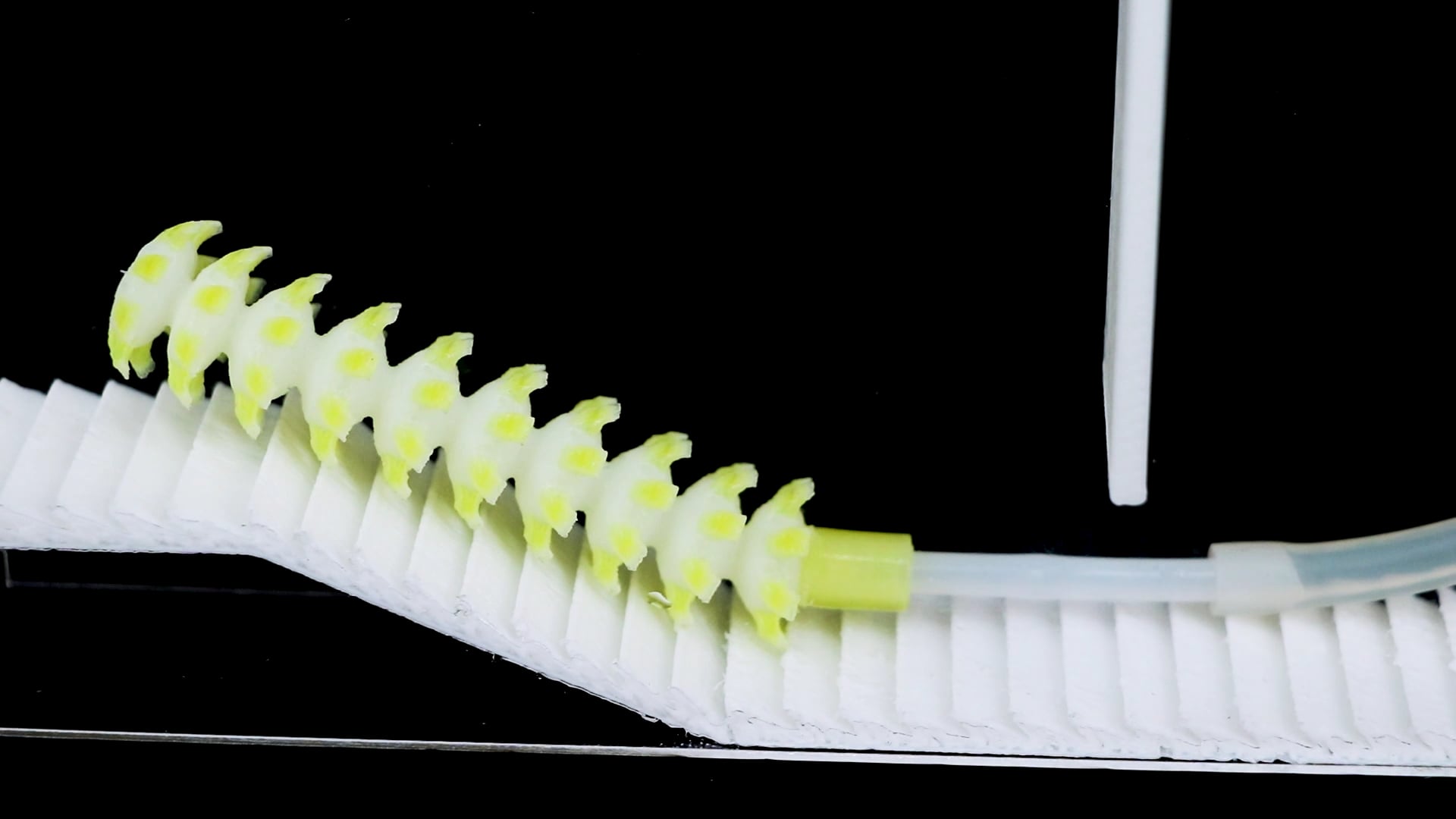
Polyjet 3D Printed Soft Robots
Master's thesis project
DOI: https://doi.org/10.26686/wgtn.14072330
In recent years, soft robotics has gained wide interest in the research field and has also garnered some commercial success. This is because soft robots are comprised of soft materials that have inherent compliance which lends them to a wide variety of applications that are not suited to traditional hard-bodied robots.
Soft robots are generally created using a casting process, which comes with limitations to the geometry due to the removal of the cast body from the mould. This research seeks to enhance the capabilities of soft robotic limbs using multi-material Polyjet printing – a recently developed additive manufacturing technology – which allows for geometric freedom and variable materials within a singular soft 3D print which is not feasible using other fabrication methods.
This research draws inspiration from natural mechanisms such as muscular hydrostats, to enable the exploration of singular channel soft robots that exhibit bending, twisting, elongation, and expansion all in one 3D print. The geometric freedom and variable materiality of the Stratasys J750 produce actuation results for each motion that cannot be easily replicated using traditional fabrication techniques. The printable materials of the Stratasys J750 were found to have tendencies to tear upon inflation, however, a large array of prints with complex geometry were able to successfully actuate despite this. In some areas, results outperformed actuators made using other fabrication techniques, as was particularly evident in the twisting actuators. Through fine-tuned parametric control with equation-driven modelling, this portfolio presents a method for soft robotic design and construction that can produce a limb with multiple motions and up to 5 axes of movement that can be tailored to specific pre-defined applications.
Well, Actuate(ly)... Final Video





